智能网联汽车协同决策与规划技术笔记
低速解构化场景中的单一车辆决策与规划
轨迹规划命题构建
车辆运动过程的最优控制问题属于连续[Bolza](博尔查问题_百度百科 (baidu.com))型问题,具有一下特征:
1)从状态方程类型来讲,它属于连续控制系统。
2)从性能指标类型来讲,它属于复合型性能指标。
3)从末端条件类型来讲,它属于末端受约束,且末端时刻可以不固定。
4)从系统函数类型来讲,它属于时变非线性系统。
Bolza 问题求解概述:
输入控制变量U(t),同时确定好终止时刻tf,使代价函数

沿着相应的状态轨线x(t)取得最小值。
约束包括:
系统动态方程约束(用于描述动力学/运动学约束):

两点边值约束:

流行约束:

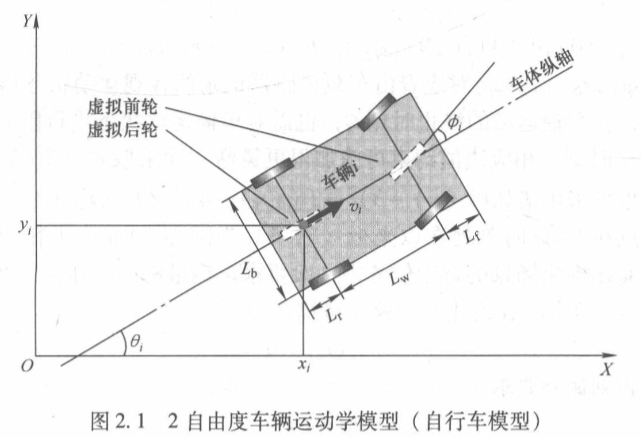
系统动态方程约束
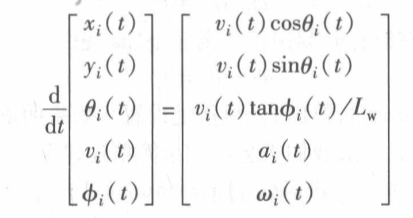
两点边值约束
在充斥着障碍物的复杂场景中,我们一般无法提前预判车辆以何种“转圈”方式抵达终点,因此下面的描述更合理。

车库约束:
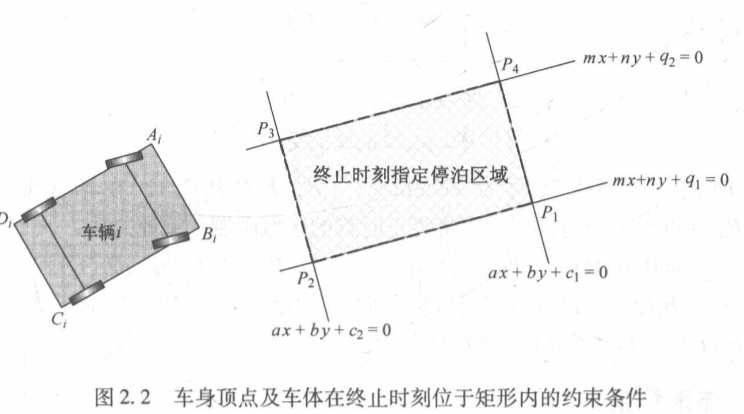
计算点在矩形内:
最终表达:

流行约束
流形约束是指作用于车辆运动过程中( 除系统动态方程之外)的约束条件,它们能够将状态/控制变量限制在解空间的某一流形上。
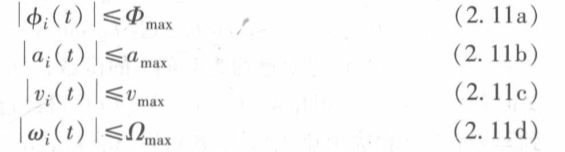
分别为,前轮转角、线加速度、行驶速度、前轮转角速度
障碍物描述:
常见的描述包括,散点集、网格图以及多边形,其中多边形描述障碍有利于构建解析形式的碰撞约束条件。散点集、网格图等其他格式的障碍物信息可经聚类、最小凸包生成等成熟算法转化为多边形障碍物。
如何描述点与多边形的位置关系?
三角面积法。
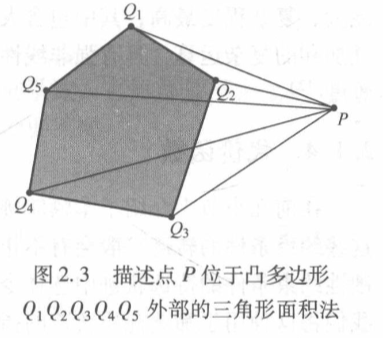
最终形式:
代表车辆构成的矩形和各障碍之间的位置关系

代价函数
筛选优质轨迹的指标式。
时间约束:
轨迹平滑约束:


远离障碍约束:

最终加权:

最优控制完整形式

轨迹规划命题的数值求解
问题被抽象为:
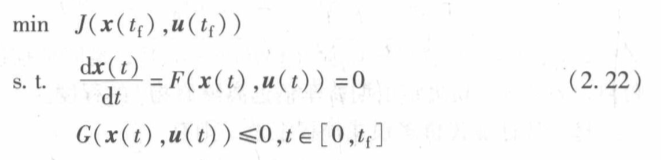
式中,x(t)代表被微分的状态变量; u(t)代表控制变量; J为仅含有末值型指标式的代价函数; F代表常微分方程组中的代数函数部分; G包含了边值约束及流形约束; tf 代表动态过程的终止时刻,且tf可不固定。
最优控制问题求解方法
一般求解方法:间接法、动态规划法和直接法,直接法将原始命题式(2.22)中的连续变量部分或全部地离散化,通过求解,离散后形成的非线性规划(NonLinearProgramming, NLP)命题来直接得到式(2.22)的数值最优解。
全联立离散化
直接法可细分为:
部分离散 —贯序策略
完全离散—联立策略
全联立正交配置有限元法( Orthogonal Collocation Drect Transcription, OCDT)是以正交配置有限元的形式将最优控制问题中的所有状态/控制变量同时离散化、全部视作决策变量而联立求解的一种方法。
非线性规划
分为梯度优化和非梯度优化
梯度优化方法:
有效集法: 序贯二次规划( Sequential Quadratic Programming, SQP )
障碍函数法:内点算法( Interior Point Method, IPM )
IPM的核心思想是将NLP问题中的不等式约束条件转化为惩罚项,在将其乘以相应障碍因子后补人目标函数中,从而将原NLP问题变为至多只包含等式约束新问题。至此求解原始NLP问题转变为求解一系列障碍因子取值不同的子问题。

X为决策变量,S为引入的松弛矢量

非线性规划的初始化
初始位置会影响最终解,会使得产生收敛速度慢或者陷入局部极值等问题。

内容来源
本章内容来源于,湖南大学李柏老师的书籍<<智能网联汽车协同决策与规划技术>>,书的内容包含单车和多车的规划,内容非常棒,推荐做协同轨迹规划的同学看看。