
机器人导论学习笔记
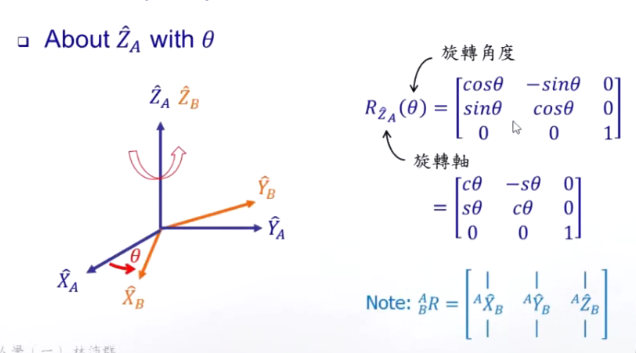
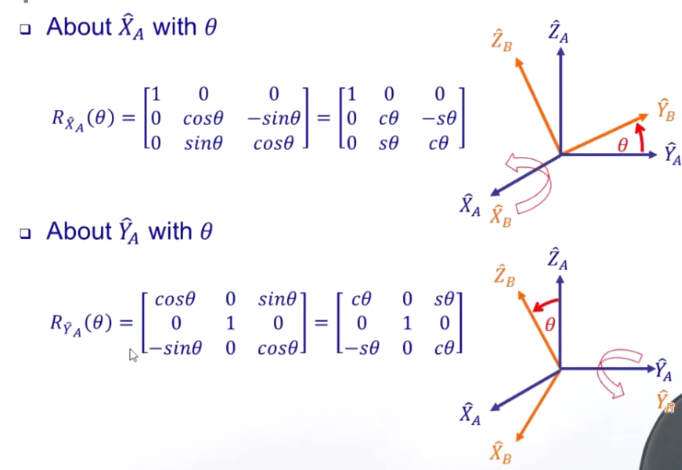
Rotation Matrix
二维Rotation Matrix
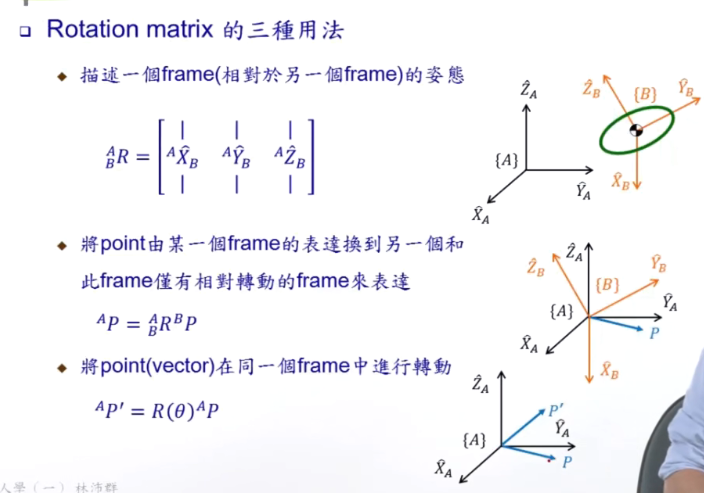
Rotation matrix的三种用法
Fixed Angles(转轴固定)
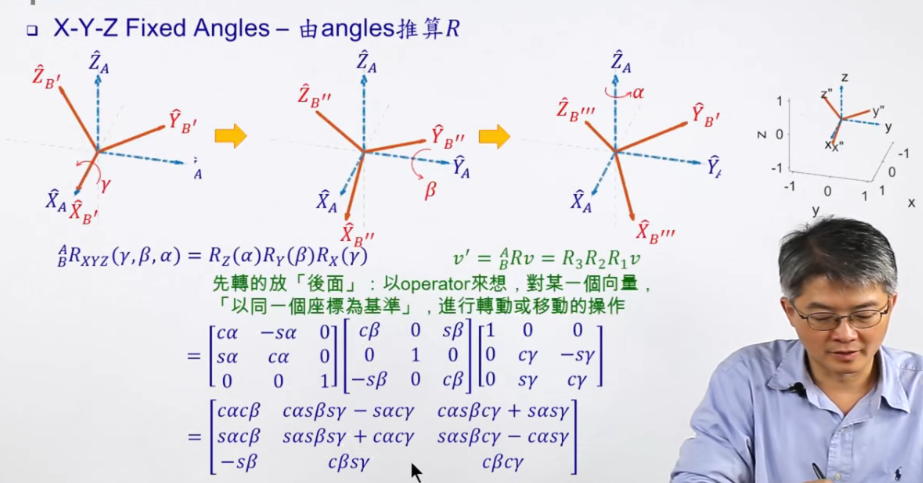
X-Y-Z Fixed Angles-由angles推算R
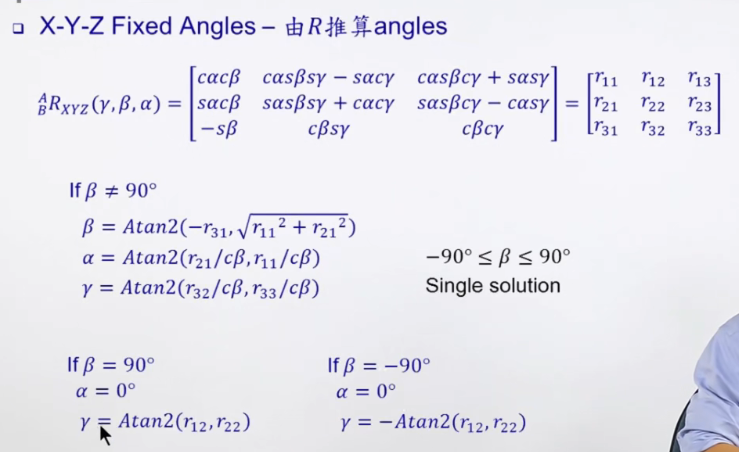
X-Y-Z Fixed Angles -由R推算angles
Euler Angles(转轴变化)
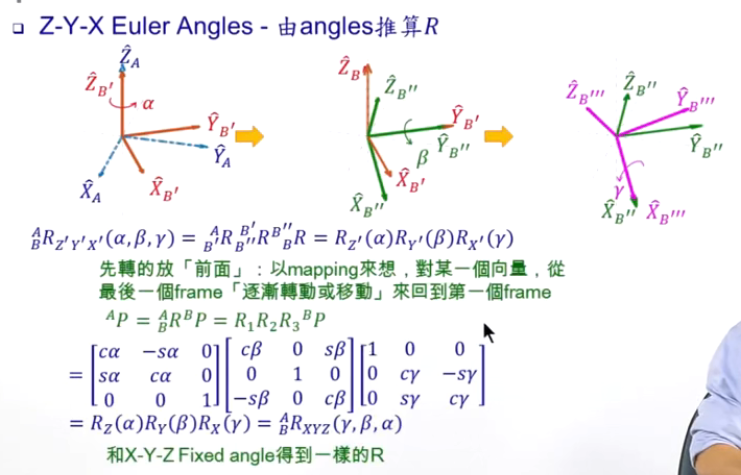
Z-Y-X Euler Angles -由angles推算R
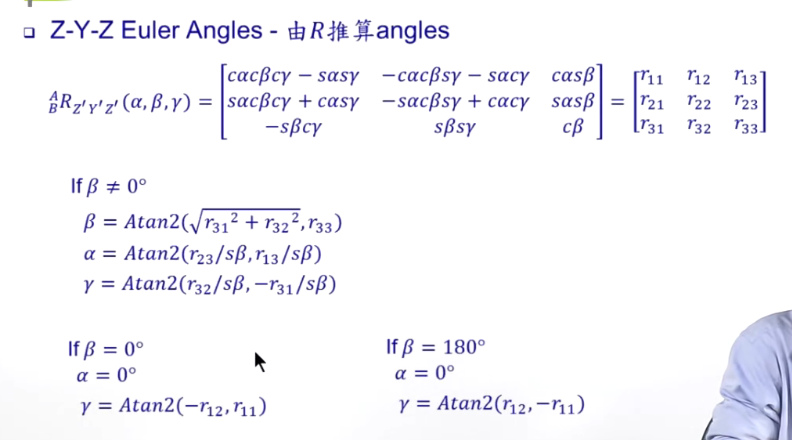
Z-Y-Z Euler Angles -由R推算angles
Mapping
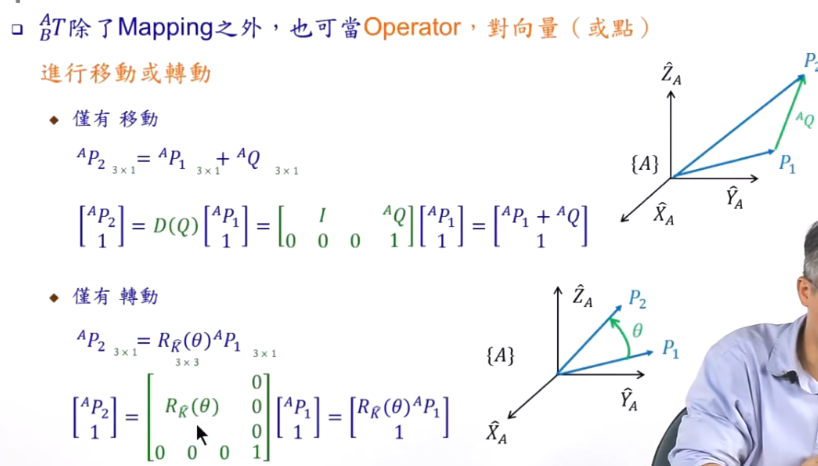
Operators
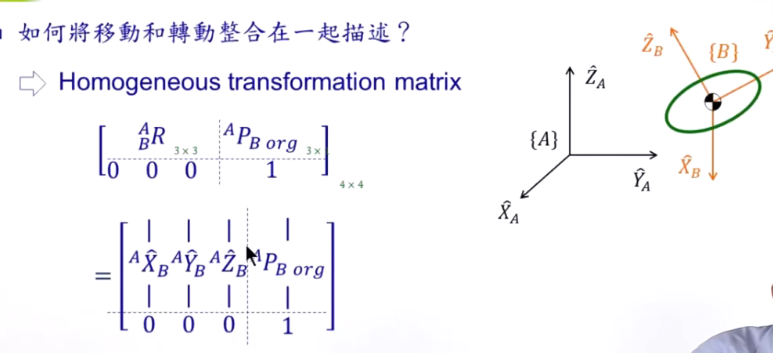
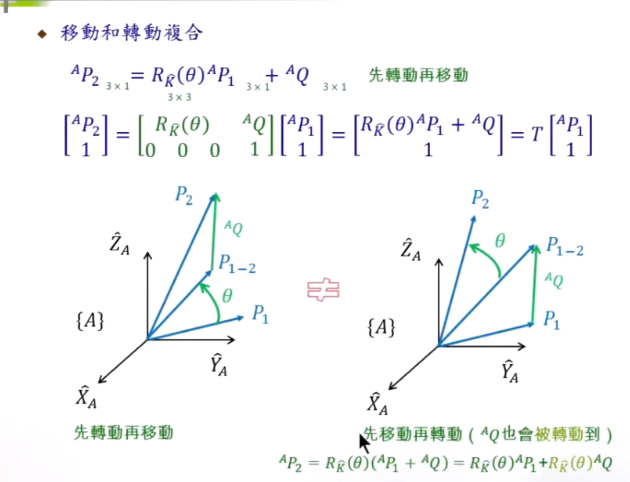
移动和转动的复合
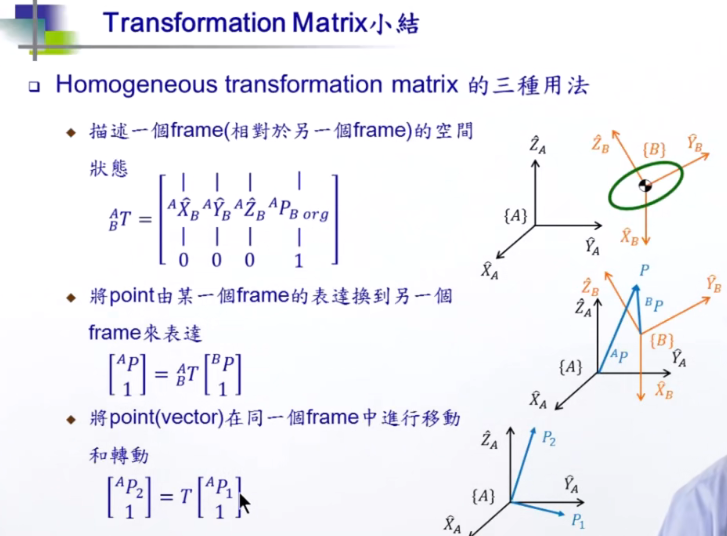
Transformation Matrix小結
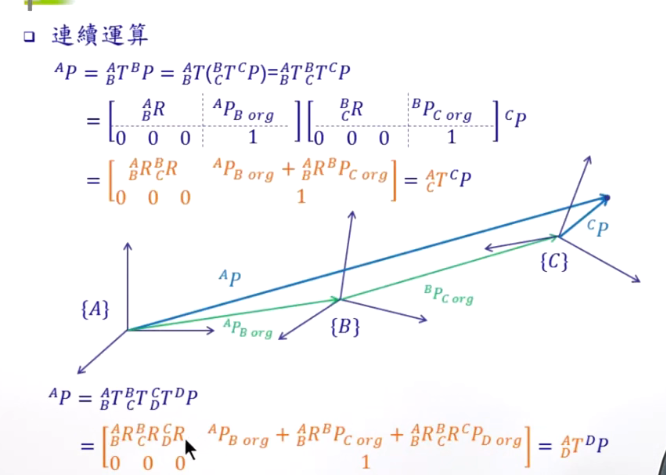
连续运算
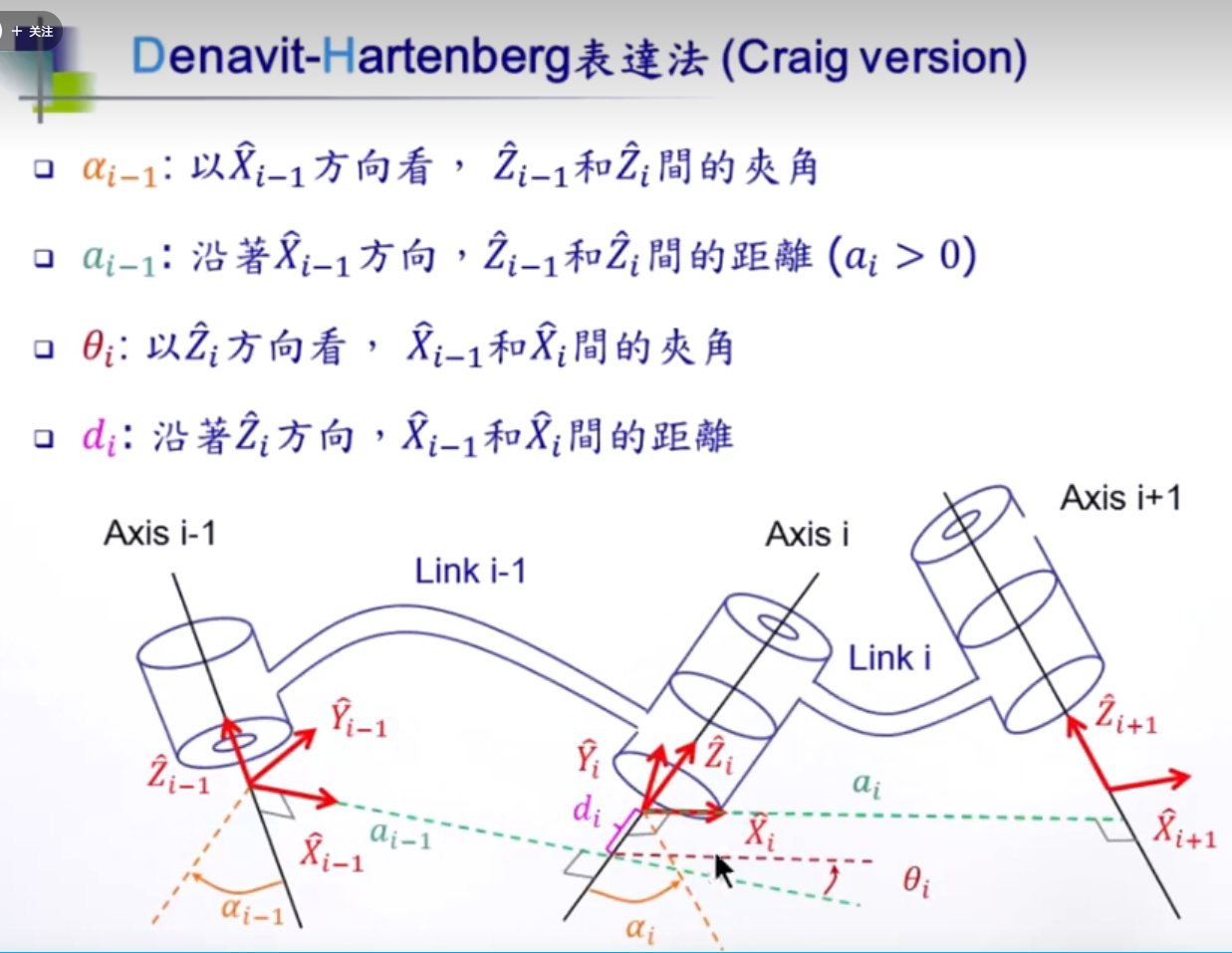
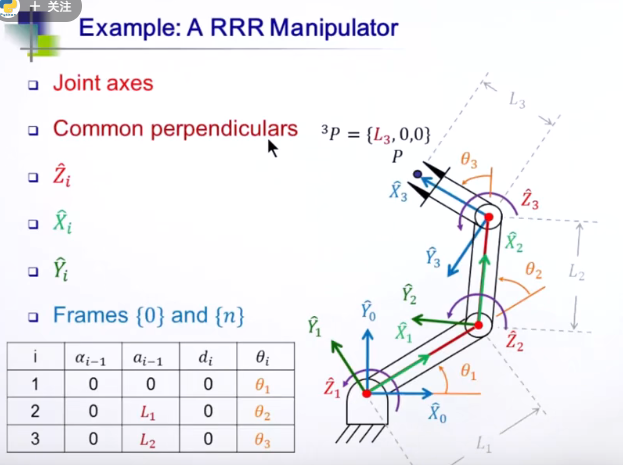
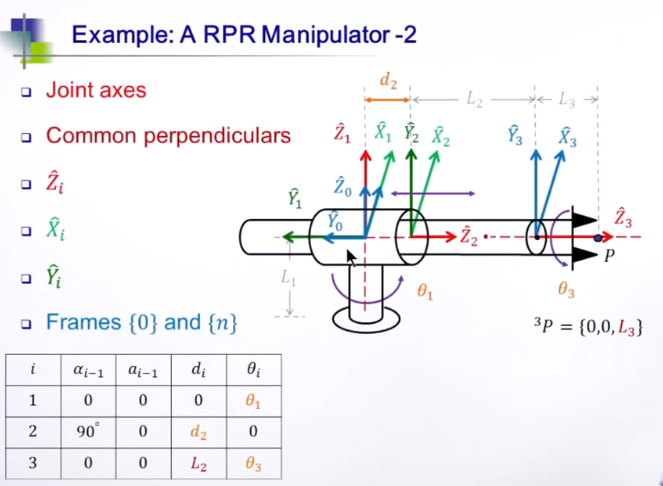
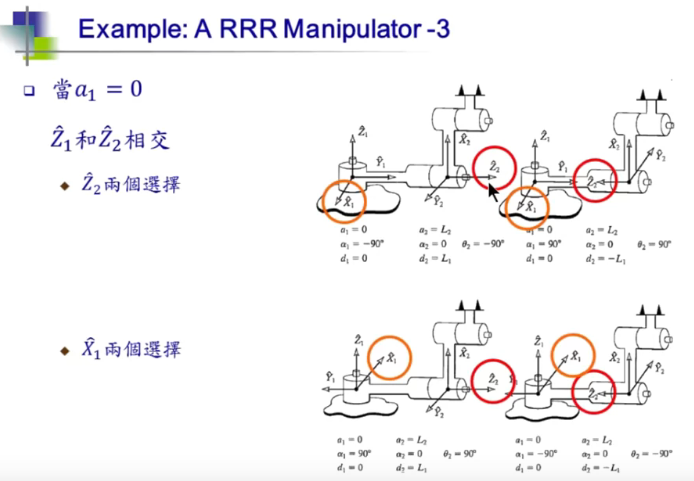
DH表达法
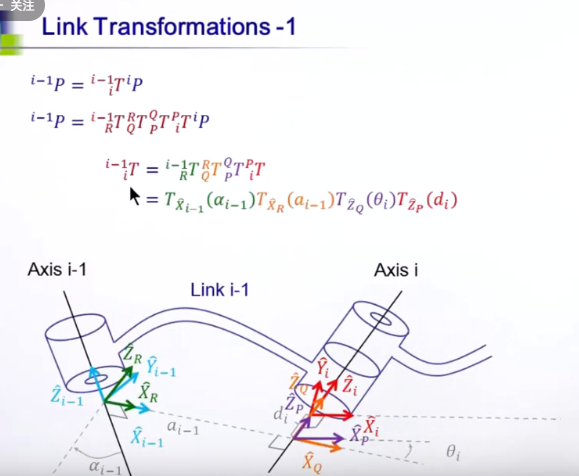
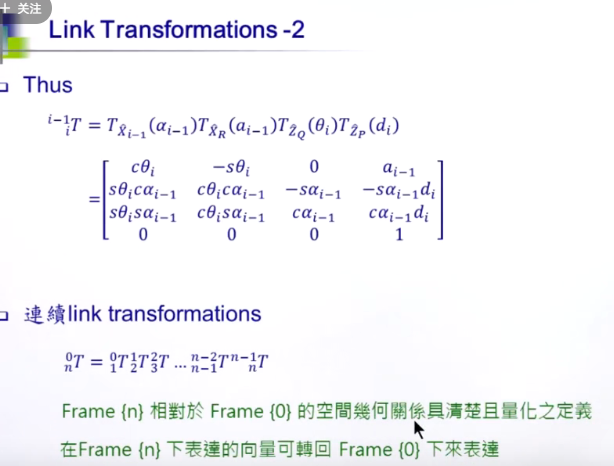
Link Transformations
笔记来源
【机器人学导论课程】台湾大学林沛群教授_人工智能AIoT(Robotics)学习参考教程,现整理分享给大家!_哔哩哔哩_bilibili
评论