
A Real-Time Path Planning Algorithm for AUV in Unknown Underwater Environment Based on Combining PSO and Waypoint Guidance
A Real-Time Path Planning Algorithm for AUV in Unknown Underwater Environment Based on Combining PSO and Waypoint Guidance
* Authors: [[Zheping Yan]], [[Jiyun Li]], [[Yi Wu]], [[Gengshi Zhang]]
- DOI: 10.3390/s19010020
初读印象
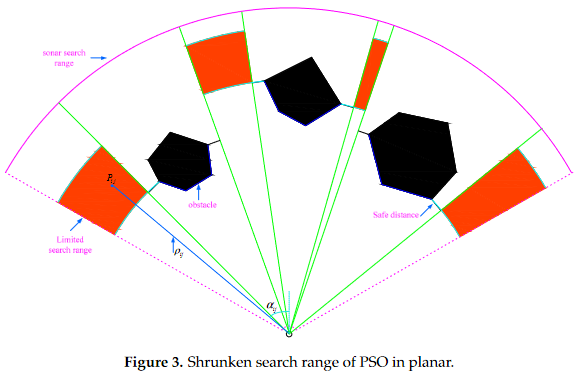
comment:: 在该算法中,使用多光束前向声纳(FLS)来检测障碍物,而FLS的输出数据用于生成这些障碍的轮廓(多边形)。粒子群优化用于搜索适当的临时航路点,其中考虑路径计划的优化参数。随后,在目的地和这些临时航路点的指导下自动生成最佳路径。
文章骨架
%%创新点到底是什么?%%
novelty:: 使用FLS进行局部路径规划的障碍检测以及临时航路点生成。使用PSO算法优化航路点。
%%有什么意义?%%
significance:: 更符合实际使用。
%%使用了什么方法?%%
usage method:: 使用 #PSO 算法优化FLS得到的航路点,同时考虑航向等优化因素。
%%优点和缺点?%%
merits :: 考虑航向以及声呐
demerits::

%%机构&作者%%
who::[[哈工程-严浙平]]
%%未来展望%%
prospect::这项工作的下一个阶段是在泳池实验中执行该算法,作者将将此算法扩展到具有混乱动态对象的更复杂的三维环境。
参考文献
[1] Yan Z, Li J, Wu Y, et al. A real-time path planning algorithm for AUV in unknown underwater environment based on combining PSO and waypoint guidance[J]. Sensors, 2018, 19(1): 20.
相关推荐





评论