
AUV回收控制的关键技术研究
AUV回收控制的关键技术研究 &考虑几何约束的AUV路径规划
初读印象
comment:: 提出了AUV的归航路径规划方法,解决了有限三维空间下约束条件的存在带来的困难,兼顾海流影响,给出归航最优路径。提出了表达路径的三次B样条曲线数学方法,通过对控制点的操作改变路径的几何特性;分析了欠驱动AUV的操纵运动方程,得到了运动学约束条件和回收任务终端约束条件;基于半物理仿真平台建立海流干扰下AUV跟踪控制的消耗模型;通过定义二元适应度函数表达约束信息和寻优信息作为遗传进化的依据,通过人工智能的遗传算法进化操作得到可行且最优路径;
文章骨架
%%创新点到底是什么?%%
==novelty:: ==提出了一种基于 #B样条 理论的路径规划方法解决约束问题,并利用 #遗传算法 强大的搜索能力以及寻优能力得到最优路径。
%%有什么意义?%%
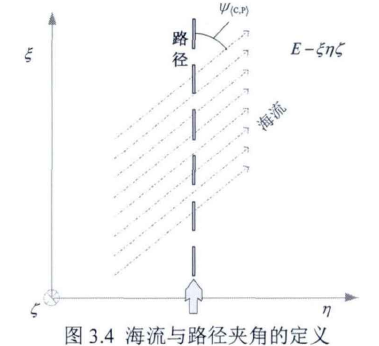
==significance:== 引入洋流的影响考虑实际的航行,进行回收轨迹规划
%%使用了什么方法?%%
==usage method:: ==
- 思路
- 解决路径的可行性问题,即“是”与“否”,给出满足约束条件的路径解空间。
- 其次是优化问题,“优”与“劣”,在解空间里寻找最优消耗的路径。
- 实现
对接方法:远处声学+近处光学。
![[Pasted image 20220718173206.png]]
总体思路是根据约束条件求解系统参数输出,即确定B样条曲线的控制点序列:
- 首先,根据任务终端约束条件,通过样板的形式设置具有一定重复度和相对位置关系的两端控制点;
- -其次,利用遗传算法优良的全局搜索寻优能力和适应性给出使得曲线满足所有约束条件的中间控制点,从而得到满足所有约束条件的解空间;
- 再次,将海流干扰下的路径消耗写入解空间中所有的个体的适应度函数,经选择操作得到适应度最优的个体就是全局的最优路径。
引入海流影响
%%优点和缺点?%%
==merits :: ==
- 满足运动学约束
- 始末状态满足回收的需求。
- 时间为1s
==demerits::==
- 未考虑对障碍的处理
- 智能优化算法结果具有随机性
- 洋流的引入较为简单
%%机构&作者%%
who::李 晔 — 哈尔滨工程大学水下机器人技术重点实验
%%未来展望%%
prospect:: 相比水池试验,海洋环境中存在海流复杂、海水浑浊度髙等影响回收的显著因素。海流对AUV的归航路径规划以及跟踪控制存在影响,海水浑浊度高对光视觉定位中的光源成像及标志点提取带来了挑战。
参考文献
[1]姜言清. AUV回收控制的关键技术研究[D].哈尔滨工程大学,2016.


评论